中國科學院團隊打造3D手型微納機器人——“手到擒來”的微觀“快遞員”
2025-11-13 10:05
來源:人民日報海外版




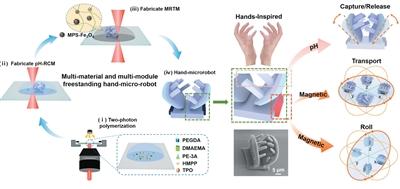
微納機器人運輸物體示意圖。受訪者供圖
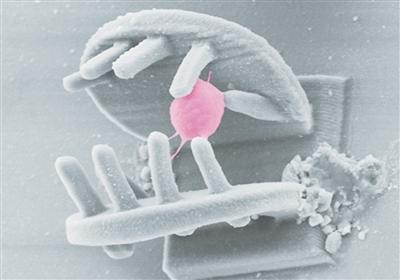
微納機器人在抓取細胞。受訪者供圖
在顯微鏡下,一滴水可以奇妙得像一個城市。最近,這個微觀“城市”里迎來了一名“快遞員”——中國科學院理化技術研究所最新研發的3D微納機器人。它的尺寸僅為40微米左右,比頭發絲的直徑還要小,卻能像機械手一樣完成抓取、運輸和釋放顆粒、細胞的精密任務,在微觀世界實現“手到擒來”,為未來精準醫療開辟了新路徑。
微觀“托舉”的靈感
微納機器人是什么?它們是工作在微米至納米尺度的“智能微型機器”,可完成運動、旋轉、抓取和釋放微小顆粒或細胞等任務,使得人類具備在微觀世界“動手”的能力。在精準醫療、環境修復、微納制造等領域,微納機器人具有廣闊前景。
“我們的出發點,是想要克服當前微納機器人的局限。”中國科學院理化技術研究所仿生智能界面科學中心研究員鄭美玲介紹,目前微納機器人多采用單一材料體系,功能難以擴展,在復雜環境中,要實現多刺激協同控制、完成多步操作,是科研界面臨的挑戰。
基于此,團隊提出了一個新思路:采用多材料多模塊加工微納機器人。
談到為什么選擇“手”的造型,鄭美玲說:“生活里,我們常用手抓取物體,所以在設計時,首先想到了仿手型的微納機器人。不僅如此,這只微型‘手’采取雙手向上托舉的姿態,手掌部分能夠靈活開合。相比于封閉的結構,手指的開放造型更便于觀察目標顆粒,也能在釋放時更加靈活。”
如何做出這么精巧的“手”?科研人員表示,依靠的是“微觀畫筆”——飛秒激光直寫技術。
從原理上講,飛秒激光直寫技術采用的是極短的“飛秒激光脈沖”(1飛秒等于一千萬億分之一秒),激光束被緊聚焦到材料內部,基于非線性光學效應,光與物質相互作用僅僅發生在光子數密度極高的焦點中心區域,從而突破光學衍射極限,實現納米高精度,比頭發絲細千倍。
因此,科研人員像畫圖一樣,用激光在不同材料上“畫”出多種微納結構,讓每個部分具備不同功能,最后構建成一只完整的3D手型微納機器人。
“快遞員”3D手型微納機器人由兩種智能材料組成,頂部是pH響應模塊,像個“感應夾子”,遇到特定酸堿環境就會自動開合;底部是磁驅動模塊,像個“微型馬達”,能用外部磁場遠程控制它移動、旋轉甚至翻轉。
成為醫生的“隱形助手”
這個“快遞員”是如何工作的呢?科研人員介紹,先把它置于液體中,當周圍環境的pH值發生變化時(如變酸或者變堿),微納機器人的“手掌”就會像花朵一樣張開或閉合。這就像我們的手遇到熱水會自動縮回來一樣,是一種聰明的應激反應。
“快遞員”如何進行配送?在磁場引導下,它能夠靈活避開“障礙物”,精準定位到目標顆粒、細胞。當檢測到酸性環境時,“手掌”自動合攏完成抓取。隨后,翻轉身體調整姿態,安全送達指定區域,并在堿性環境下完成釋放顆粒、細胞的動作。
“我們對它的性能進行了多輪實驗驗證。”鄭美玲說,“首先是抓取能力。實驗中,機器人不僅成功抓取運輸并釋放了直徑約10微米的聚苯乙烯(PS)微球;而且還成功對人體腎癌細胞(786-O細胞)進行了精準操作。在運動性能方面,磁場驅動下,機器人可以在液體中靈活移動,最高速度達到每秒65.56微米,并能實現上下、左右的平面移動,甚至完成翻轉和滾動,輕松越過障礙。”
此外,它的可靠性也超出預期。科研人員讓機器人反復經歷酸—堿環境循環刺激,“手掌”部分在超過15次開合后仍能穩定響應,沒有出現結構疲勞或功能衰退。
從感應到行動、從抓取到釋放,3D手型微納機器人解決了傳統微納機器人單響應、單功能的技術限制,為微觀世界的精準操控打開了新大門。
團隊表示,未來應用中,這樣的微納機器人很有潛力。我們也許能看到這些微觀“快遞員”在各個角落執行精密的任務,如在人體內攜帶藥物穿梭,成為醫生的“隱形助手”。
鄭美玲說:“微納機器人可作為單細胞水平的微操作平臺,為細胞分選、細胞注入、細胞力學研究等提供可能。同時,在靶向藥物和微創手術方面也有較好的應用前景,例如清除血栓等。”
除了醫學領域,微納機器人還可以拓展至環境修復、微納制造等領域,例如用于抓取、富集并移除水環境中的特定污染物(如微塑料、重金屬顆粒),作為微觀尺度上可編程的組裝工具,用于搬運和組裝微納元器件等。同時,還可以作為研究微觀世界力學、流體力學的理想平臺,為基礎科學研究助力。(記者 周姝蕓)